近期,針對我國漁船作業仍處于粗放型生產,漁具漁法雜亂不規范、作業和監管無序等問題,漁機所通過基于船載視頻的人工智能漁船作業方式識別技術,結合多源數據對漁具、漁法的監測,在提高漁船合規作業的監管信息獲取能力上取得新進展。


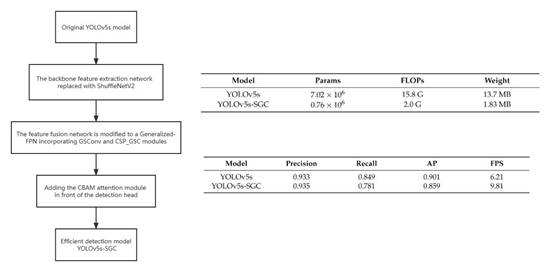

漁機所智慧漁業創新團隊采用船載攝像頭與船載設備的硬件性能改進了YOLOv5s檢測模型,提出一種輕量級實時檢測船員及收放網的方法YOLOv5s-SGC,其以YOLOv5s 模型為基礎,采用ShuffleNetV2替換了 YOLOv5s的主干網絡,用改進的Generalized-FPN 替換了特征融合網絡降低檢測模型的計算量和模型大小,并在檢測頭前增加了CBAM注意力模塊增加模型的檢測精度。改進算法的識別準確度可達到85.9%,運算速度更快,每秒可處理9.81幀圖像,滿足實時性要求。經研究測試發現,YOLOv5s-SGC能夠為實時的漁船作業圖像檢測提供一種輕量化的實施高效檢測方法,可在漁船攝像頭上進行部署,為漁船作業狀態的實時檢測提供技術支持,提高漁船智能化水平。
漁機所與上海海洋大學聯合培養研究生汪嘉銘同學,在導師李國棟研究員的指導下開展漁船作業狀態智能識別技術研究工作,以第一作者在學術期刊《Fishes》發表研究論文“A Real-Time Lightweight Detection Algorithm for Deck Crew and the Use of Fishing Nets Based on Improved YOLOv5s Network”。


 滬公網安備 31011002002435號
滬公網安備 31011002002435號